Vorbild Gecko: Hafteffekt lässt sich mit UV-Licht steuern
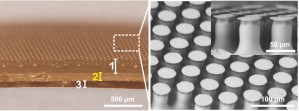
„Wir konnten die von Geckos inspirierte trockene Adhäsion mit Licht kontrollieren“, sagt Emre Kizilkan vom Zoologischen Institut der Universität Kiel. Gemeinsam mit seinen Kollegen kombinierte Kizilkan verschiedene Substanzen, um den gewünschten schaltbaren Hafteffekt zu erzielen. Insgesamt bestand der Haftgreifer aus drei Schichten: Aus dem Silikon-Kunststoff Polydimethylsiloxan fertigten sie eine etwa 100 Mikrometer dünne Schicht, die auf einer Seite zahlreiche kleine, konisch geformte Säulen aufwies. Darauf deponierten sie eine Lage aus einem lichtaktiven Material mit der organischen Verbindung Azobenzol als wichtigstem Bestandteil. Auf dieses Sandwich folgte eine weitere schützende Lage aus dem Silikon-Kunststoff.
Mit den filigranen Silikonsäulen haftete dieses Kompositmaterial auf glatten Flächen und auch dreidimensionalen Objekten aus Glas oder Kunststoff. Über Adhäsionskräfte von knapp einem Millinewton konnten diese Objekte angehoben werden. Mit ultraviolettem Licht (320 – 380 Nanometer Wellenlänge) bestrahlt, verformte sich die mittlere Schicht aus dem Azobenzol-haltigen, flüssig-kristallinen Elastomer. Dadurch krümmte sich auch die Silikonschicht, die Adhäsionskräfte gingen drastisch auf etwa ein Drittel zurück und das zuvor anhaftende Objekt löste sich wieder. Ohne UV-Licht nahm das Material wieder seine ursprüngliche Form an. Versuche mit ersten Testgreifern liefen erfolgreich. Kizilkan und Kollegen konnten so etwa kleine Glaskügelchen, Deckgläser für Mikroskopproben und sogar kleine Pipetten aus Plastik aufnehmen, transportieren und auf Wunsch wieder absetzen.
Auch andere Forschergruppen konzipierten bereits schaltbare Haftmaterialien. Doch für dessen Kontrolle mussten sie abwechselnd erhitzt und gekühlt werden oder verlangten nach einem komplexen elektronischen Steuerung. Die Kieler Entwicklung lässt sich mit UV-Licht einfacher und zuverlässiger kontrollieren und besteht zudem auf gut verfügbaren und relativ günstigen Substanzen. So könnten bald schaltbare Haftgreifer entwickelt werden, mit denen beispielsweise Laborautomaten oder auch größere Roboter ausgestattet werden könnten.

 Was Sie schon immer über Mikroben wissen wollten
Was Sie schon immer über Mikroben wissen wollten Energiewende: Schluss mit Schwarz-Weiß-Strategien
Energiewende: Schluss mit Schwarz-Weiß-Strategien Nicole Bender und Lotte Habermann-Horstmeier: Evolution und Gesundheit
Nicole Bender und Lotte Habermann-Horstmeier: Evolution und Gesundheit 